The goal of this recently formed sub-system is to develop controllers and mechanisms, so as to improve the performance and the dynamic behavior of the rocket. Some of the systems might be roll control, thrust vector control, and altitude control systems.
This is achieved through analysis, modeling of physical and automatic control systems, and extraction of transfer functions. Necessary for the design and performance assessment of the controller is the simulation of the systems. These are realized in Matlab and Simulink. The subsystem is responsible for modeling, controller tuning, coding the microcontroller, and developing the mechanism and the PCB that controls it.
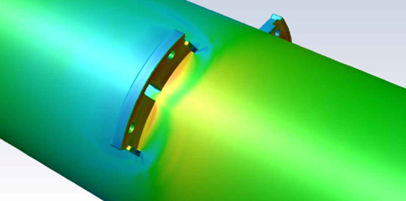
The subsystem is currently working on an airbrake system, which is an altitude control system. Its purpose is reaching the desired altitude precisely. The mechanism features fins, vertical to the airflow, that increase the rocket’s drag. The rocket is designed to reach a higher apogee without them extending. Then a controller is designed that regulates their extension during flights, by taking real-time data and comparing estimated apogee with the desired one. In this way, precision is achieved.