Autopilot
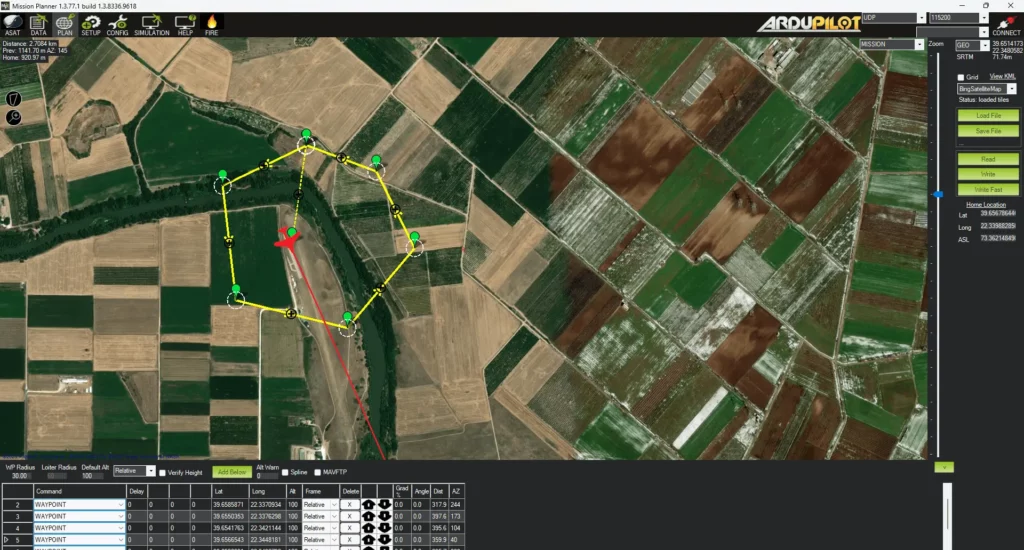
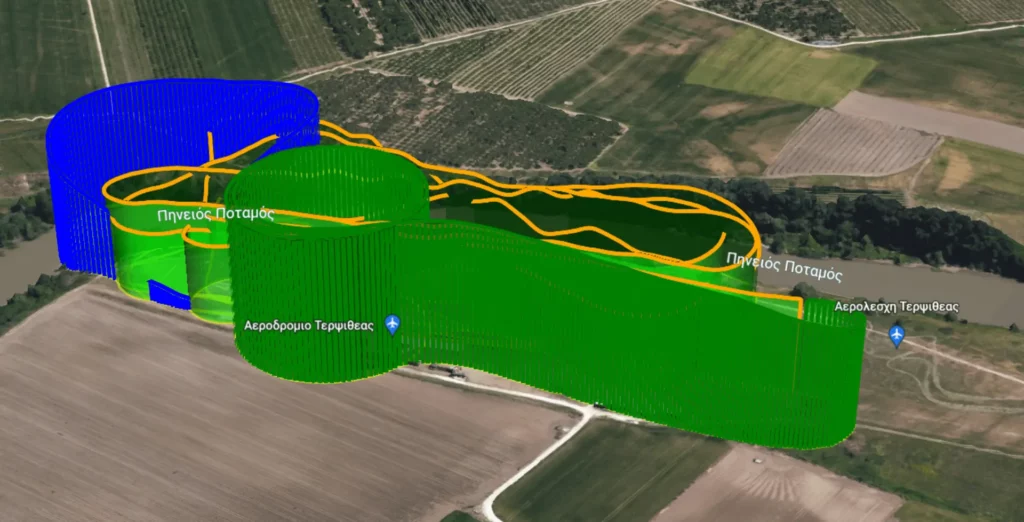
As a part of the project’s research on solar-powered UAVs, the Avionics Software Development sub-system is focusing on the development of an autopilot system. This includes the selection of the right hardware platform and programming it in a way that will fit the mission’s requirements in autonomy and stability.
The ArduPilot open-source codebase has been selected, as well as the Pixhawk Cube Orange flight controller. Utilizing the tools that are embedded in ArduPilot, the Software Development sub-system has managed to run simulations using the Software in the Loop (SITL) method, which gives us the ability to experiment with various flight parameters, such as wind velocity. Thus we retrieve useful information regarding the aircraft’s behavior in real conditions. Furthermore, the sub-system is responsible for tuning the parameters of the autopilot during test flights to optimize the performance of the UAV during flight. The sub-system also aspires to get involved with path optimization algorithms, in order to minimize the energy used during the flight.
Fire Detection System
In the mission’s context, the aircraft must be able to recognize fires and notify the fire authorities. For that purpose, apart from the flight controller, there will also be a companion computer, which will run deep-learning computer vision algorithms based on artificial neural networks, using images from a camera as input.
The PyTorch framework has been selected as a base to develop code for training and optimizing convolutional neural network (CNN) models to be used on the solar UAV. The models are being trained on a dataset constructed from various sources, including top academic papers considering fire detection.