Αυτόματος Πιλότος
Ως μέρος της έρευνας του project μας στο ηλιακά τροφοδοτούμενο UAV Phoenix, το υποσύστημα εστιάζει στην ανάπτυξη ενός συστήματος αυτόματου πιλότου. Αυτό περιλαμβάνει την επιλογή της κατάλληλης πλατφόρμας hardware και τον προγραμματισμό της με τρόπο τέτοιο ώστε να ικανοποιεί τις απαιτήσεις της αποστολής σε αυτονομία και σταθερότητα. Έχει επιλεγεί το λογισμικό ανοιχτού κώδικα ArduPilot, καθώς και ο ελεγκτής Cube Orange.
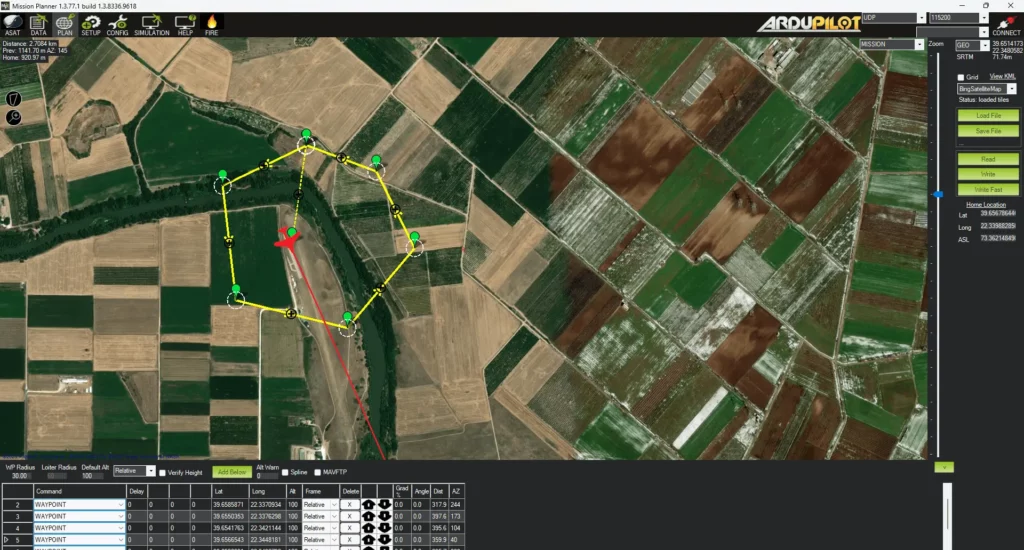
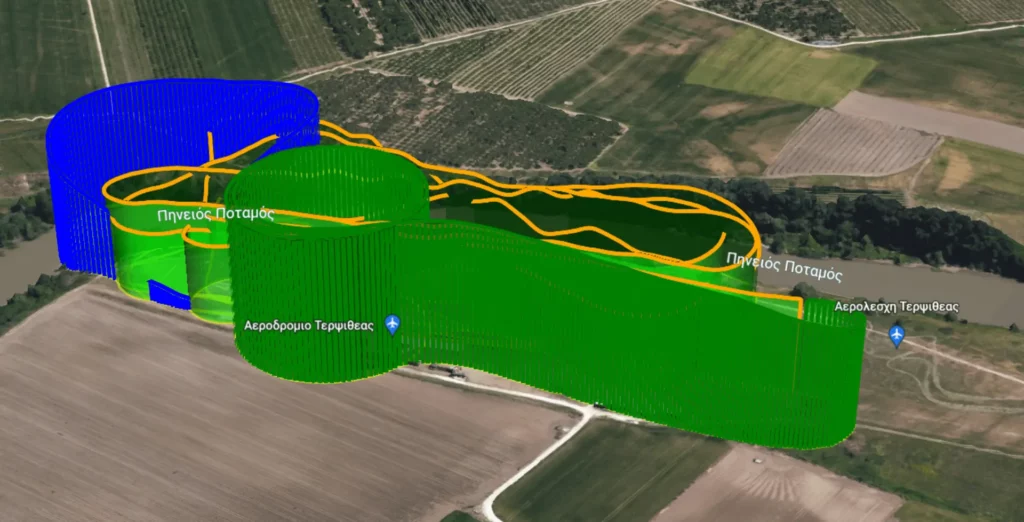
Με τα εργαλεία που διαθέτει ενσωματωμένα το ArduPilot, το υποσύστημα έχει καταφέρει να τρέξει προσομοιώσεις με τη μέθοδο Software in the Loop (SITL), οι οποίες μας δίνουν τη δυνατότητα να πειραματιστούμε με διάφορες παραμέτρους της πτήσης, όπως η ταχύτητα του ανέμου. Έτσι, λαμβάνουμε χρήσιμες πληροφορίες για την συμπεριφορά του αεροπλάνου σε πραγματικές συνθήκες. Επιπλέον, το υποσύστημα είναι υπεύθυνο για την ρύθμιση των παραμέτρων του αυτόματου πιλότου κατά την διάρκεια των δοκιμαστικών πτήσεων, με σκοπό την βελτιστοποίηση των επιδόσεων του UAV κατά την διάρκεια των πτήσεων.
Σύστημα Ανίχνευσης Πυρκαγιάς
Στα πλαίσια της αποστολής, το αερόχημα θα πρέπει να είναι σε θέση να αναγνωρίζει πυρκαγιές και να ειδοποιεί τις αρμόδιες αρχές. Για τον λόγο αυτό, θα υπάρχει στο UAV, εκτός από τον flight controller, ένας δεύτερος υπολογιστής, στον οποίο θα υλοποιούνται αλγόριθμοι τεχνητής όρασης (computer vision) βαθιάς μάθησης, βασισμένοι σε τεχνητά νευρωνικά δίκτυα, με είσοδο εικόνων από κάμερα.Το PyTorch framework έχει επιλεχθεί ως βάση για ανάπτυξη κώδικα για την εκπαίδευση και βελτιστοποίηση των μοντέλων Συνελικτικών Νευρωνικών Δικτύων (CNN) που θα χρησιμοποιηθούν στο ηλιακά τροφοδοτούμενο αερόχημα Phoenix. Τα μοντέλα εκπαιδεύονται πάνω σε μια βάση δεδομένων που δημιουργήθηκε από διάφορες πηγές, συμπεριλαμβανομένων κορυφαίων ακαδημαϊκών paper πάνω στην αναγνώριση πυρκαγιών.