The Hardware Development sub-system’s main responsibilities are the development of flight measurement systems, the collection, and processing of flight data, the implementation of telemetry systems, as well as the UAVs’ electric equipment, such as servomotors, batteries and ESCs (Electronic Speed Controllers).
Measurement/Telemetry systems
Flight data collection is an inseparable part of the design optimisation, as it allows us to examine our UAVs’ performance under different conditions. Some of the most important flight parameters include position, altitude, velocity, pressure and acceleration. The sub-system is responsible for creating sensor boards, which include sensors, a microcontroller and various peripherals. The sensors we pick according to the hardware specifications (e.g. required voltage) and mission requirements measure various physical quantities and convert them to electric signals that can be read and processed by a microcontroller. The data is stored for later retrieval. The sub-system’s members program the microcontroller, often using existing code libraries, or developing their own for more efficient utilization of flight data.
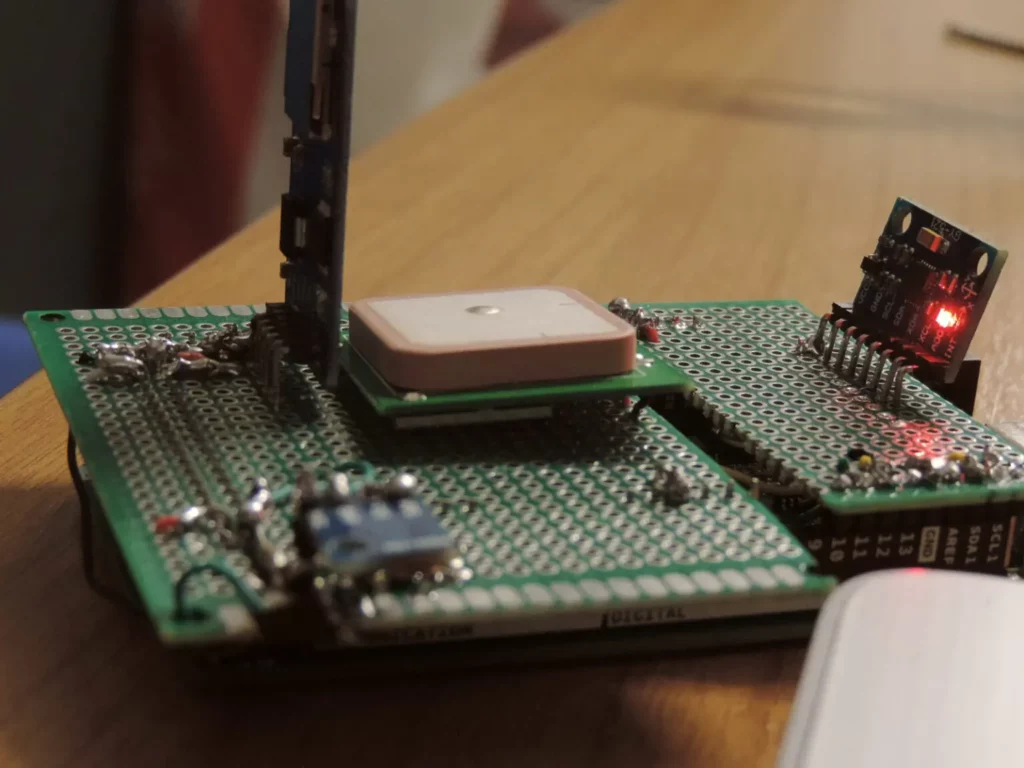
The first measurement system that has been developed was soldered on prototyping boards. The sub-system is currently developing SensorBoard v3.0, which is a Printed Circuit Board (PCB) based on an STM32 microcontroller. The next version to be designed (SensorBoard v4.0) will be similar, but will feature a more complex PCB and will include many more advanced sensors.
SensorBoard v3.0
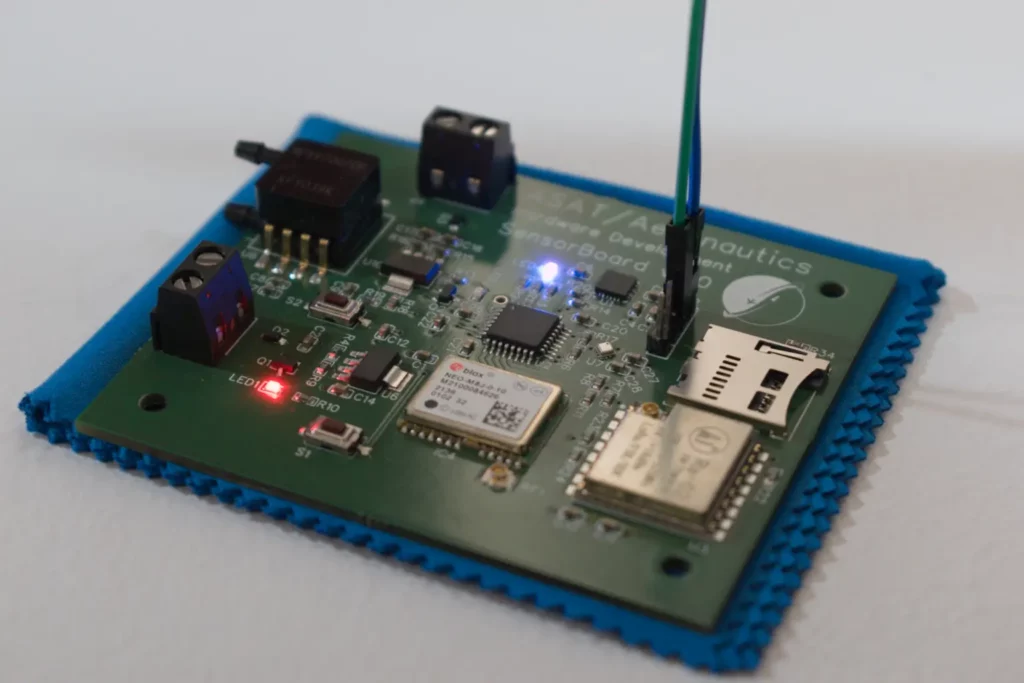
SensorBoard v3.0 is the third measurement board developed by the sub-system and the second one to feature live telemetry. It features many sensors including accelerometers, gyros, GNSS, pressure sensors, temperature sensors, a micro SD card storage and a LoRa module. The brain of the SensorBoard v3.0 is a STM32G0 series low power microcontroller which collects all the data from the sensors, saves them on the micro SD card and transmits the data to the Ground Station (GS) using the LoRa module.

It is worth mentioning that the first SensorBoard ever developed (SensorBoard v1.0) was built around a prototyping board and did not feature a live telemetry system. SensorBoard v2.0 on the other hand did include a LoRa module, just like v3.0, but having an ATmega microcontroller made it’s manufacturing impossible, due to the chip sortage of 2020.
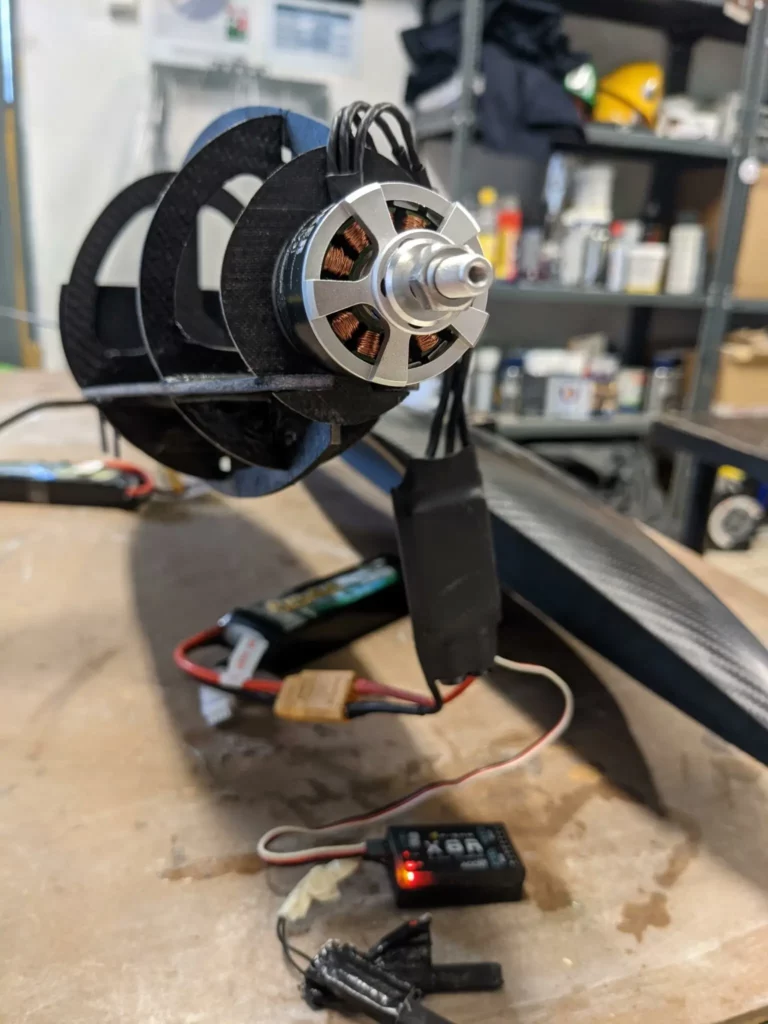
Servomotors, batteries, ESCs
In order to control the attitude of a UAV, control surfaces are used. These are surfaces on the UAV’s wings and tail that can be moved by a servomotor, thus generating differences in pressure which result in aerodynamic forces that rotate the aircraft around its axes of freedom. The Aeronautics project usually uses two ailerons, an elevator and a rudder. The servomotors that move these are chosen by the Hardware Development sub-system, after conducting research based on the amount of torque required, using both online as well as ASAT-developed tools.
The sub-system is also responsible for the selection of the battery that powers the aircraft’s motor. Several parameters are taken into consideration, such as nominal voltage, capacity, discharge current and battery mass and type.
Finally, in order to control the speed of the motor, Electronic Speed Controllers (ESCs) are used. It is the Hardware Development sub-system’s responsibility to connect these to the motor and the battery of the UAV.