

Payload
The payload defines the mission of the rocket. It can be anything from a scientific experiment and a communication device to the most valuable payload that has been carried by rocket into space, which is a human being. The Payload subsystem is responsible for the implementation of a payload that will take advantage of the […]
Avionics
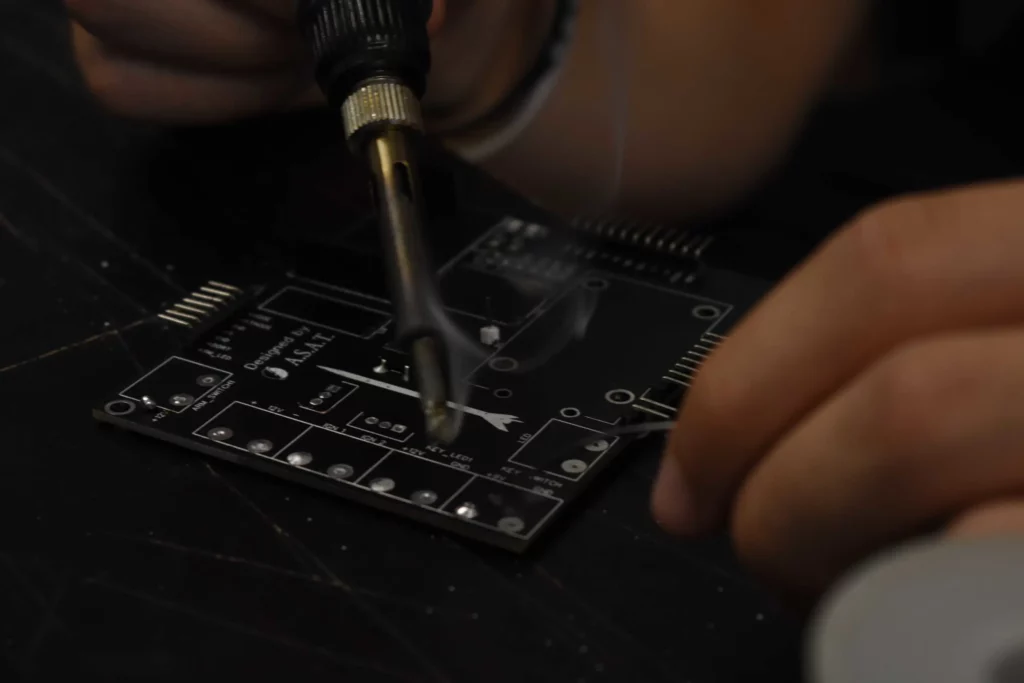
The Avionics subsystem is responsible for the rocket’s electronics design, testing, and programming. The members mostly focus on the recovery electronics, that consist of: It operates in an STM32 environment, gathering altitude, acceleration, and orientation data from multiple sensors to accurately determine the rocket’s position. Once the apogee is detected, an event is triggered that […]
Aerodynamics
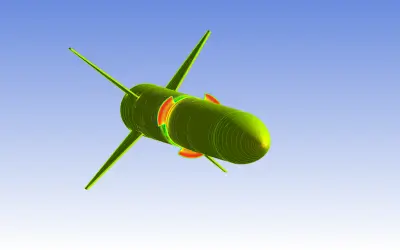
The Aerodynamics subsystem specializes in the design of the aerodynamic parts and the trajectory analysis of the rocket. To achieve the best possible results, the subsystem develops its own tools that are based on existing computing resources or new methods that optimize the aerodynamics properties of the rocket, perform CFD analysis, and multiple types of […]
Structural

General In the structural subsystem, the team members are responsible for the design, analysis and construction of every part of what will eventually be used in the final rocket. Every rocket is an assembly that consists of several sub-assemblies and parts. Each one of those parts, is designed and manufactured with a different method and […]
Propulsion

The Propulsion subsystem is in control of the rocket’s propulsion system. It is therefore involved in the development of code for simulating both the motor’s as well as the rocket’s performance, the manufacturing of solid propellant, and, lastly, the design and manufacturing of rocket motors. In the pursuit of reaching a given altitude with great […]
Communications
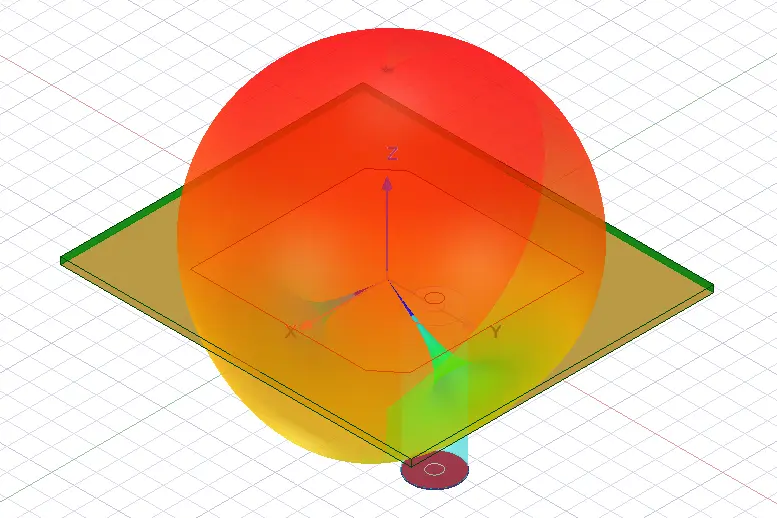
Research of Communication Technologies In the context of the Phoenix mission, which will fly over isolated forest areas, there is a need for a reliable communication system with two way link coverage. The Communications subsystem carries out research on all the available data link candidates, including Wi-Fi, cellular and satellite networks, Software Defined Radio, LPWAN […]
Software Development

Autopilot As a part of the project’s research on solar-powered UAVs, the Avionics Software Development sub-system is focusing on the development of an autopilot system. This includes the selection of the right hardware platform and programming it in a way that will fit the mission’s requirements in autonomy and stability. The ArduPilot open-source codebase has […]
Aerodynamics Design
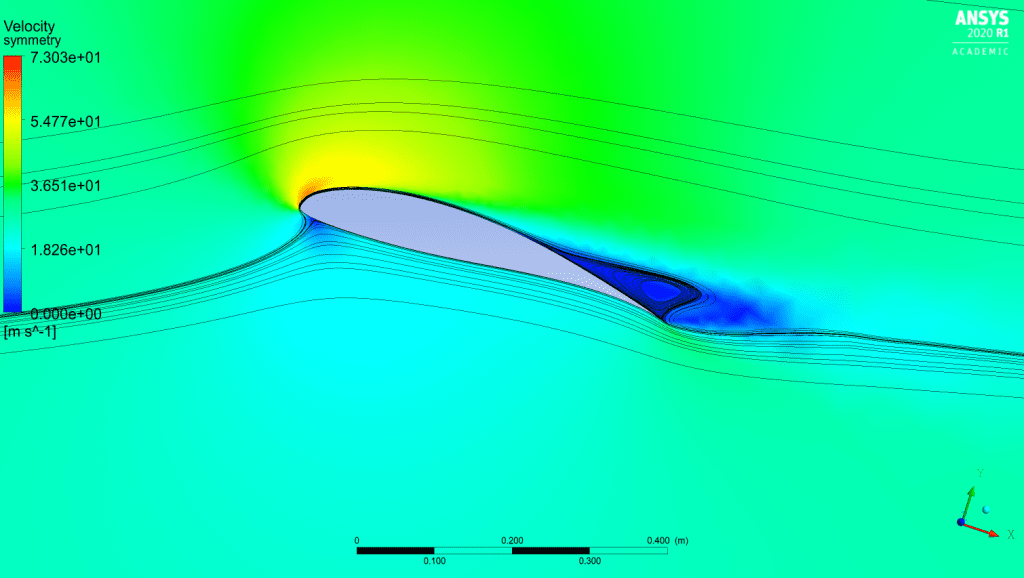
Airfoil selection This is the process of selecting the appropriate airfoil based on criteria set by the mission requirements and design preferences. Since it is conducted at the beginning of the design process mainly low-fidelity tools are used for that matter, however, high-fidelity tools can be used to appropriately visualize the flow. Wing, tail and […]
Solar Energy Management
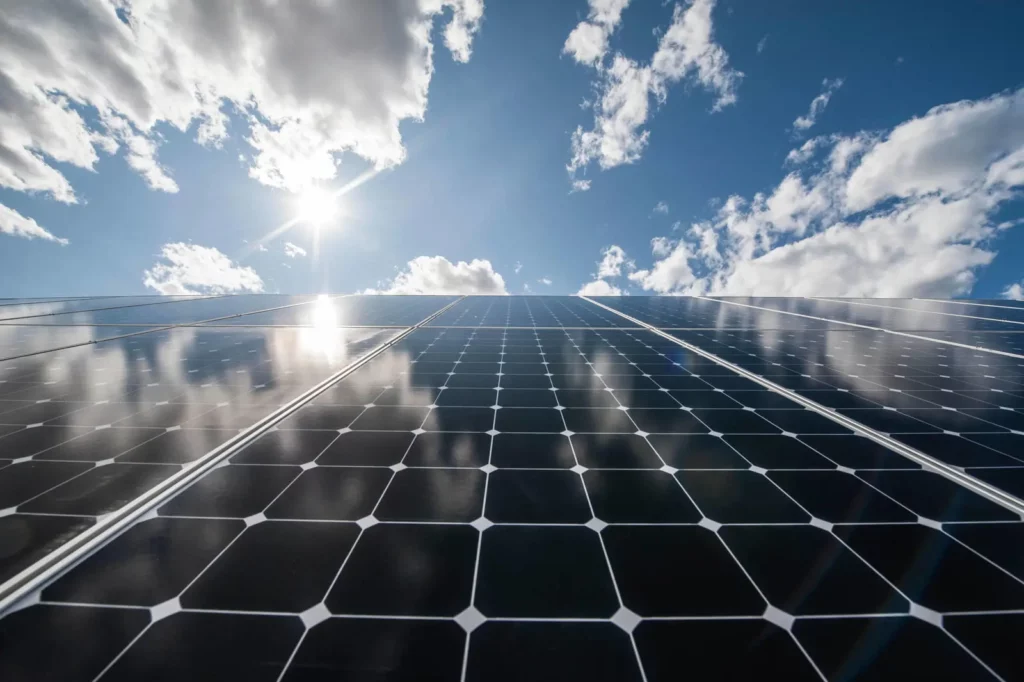
The SEM subsystem’s main responsibilities are solar panel design, analysis and implementation, alongside with battery research and selection, and lastly design of the charging circuit. Photovoltaic (PV) Panel Selecting the appropriate photovoltaic cell is crucial for Phoenix’s autonomy. The total photovoltaic panel should not only meet the UAV’s energy requirements, but also be suitable in […]
Hardware Development
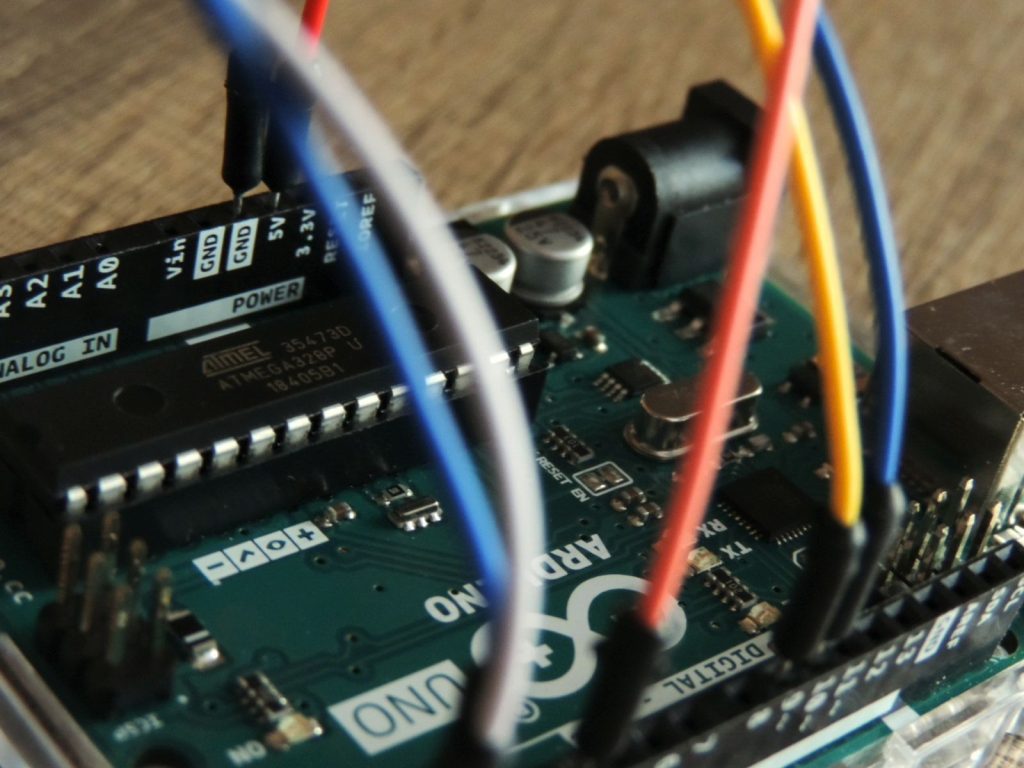
The Hardware Development sub-system’s main responsibilities are the development of flight measurement systems, the collection, and processing of flight data, the implementation of telemetry systems, as well as the UAVs’ electric equipment, such as servomotors, batteries and ESCs (Electronic Speed Controllers). Measurement/Telemetry systems Flight data collection is an inseparable part of the design optimisation, as […]